ربات دلتا چیست؟ کاربرد آن
برای شناخت ربات دلتا بهتر است بدانیم که تاکتیک تقلید از طرحها و سازههای تکنولوژیک از آنهایی که در طبیعت یافت میشوند. بعنوان بیومیمیکری شناخته میشوند. یک مثال خوب از بیومیمیکری ایجاد یک ربات مونتاژ دو بازو با مفاصل مچ، آرنج و شانه درست مانند انسان است. مهندسان اغلب ایدههای خود را برای سیستمهای رباتیک بر اساس سیستمهای اسکلتی عضلانی حیوانات و مانند اینها قرار میدهند. از این گذشته، بازوها و دستهای رباتیک مکانی فوقالعاده برای شروع ساخت ربات برای انجام وظایفی هستند که اغلب توسط بازوها و دستهای انسان انجام میشوند.
مطالب مرتبط:
ربات دلتا از آنجایی که کاملاً از محدودیتهای بیومیمیکری رهایی مییابد بسیار جذاب است. این ربات یک دستگاه مولد و بهینه است که نشانههای طراحی خود را از ریاضیات و هندسه خالص گرفته تا از دنیای طبیعی. برای کشف جزئیات این رباتهای جالب، از موارد استفاده ایدهآل گرفته تا اغلب حالتهای خرابی، با متخصصانی از ABB، FANUC، Kawasaki Robotics، Omron و Yaskawa Motoman صحبت کردیم. همچنین با خالق آنها، دکتر ریموند کلاول، گفتگو کردیم تا دیدگاه او را در مورد چگونگی پیدایش ماشینها دریافت کنیم. برای توضیح کامل رباتهای دلتا، بهخواندن مقاله امروز سپیانی ادامه دهید.
حتما بخوانید:
اختراع ربات دلتا:
رباتهای دلتا امروزه بطور گسترده در بخش اتوماسیون صنعتی استفاده میشوند. برخلاف بازوهای مفصلی بزرگتر، تولیدکنندگان متعددی مانند Yaskawa Motoman و ABB اغلب رباتهای دلتا را در انبار نگهداری میکنند. اما در سال 1985، رباتهای زیادی نمیتوانستند بسرعت یا بطور پیوسته وظایف ساده انتخاب و جاسازی را انجام دهند.
پس از بازدید از یک کارخانه شکلات، ریموند کلاول و گروهش در آزمایشگاه سیستمهای رباتیک در Ecole Polytechnique Federale de Lozanne (EPFL) مطالعه ای را آغاز کردند که منجربه ربات دلتا شد. بهگفته تیم کلاول که در جستجوی کاربردهای تکراری کار برای روباتها بودند. بستهبندی پرالینهای شکلاتی مدعی این نوع اتوماسیون با سرعت بالا و بار کم بود.
اولین کاری که تیم کلاول انجام داد این بود که محدودیتهایی را بر مفهوم خود اعمال کرد. ربات ابتدا باید با سرعت سه پیک در ثانیه کار کند. تحرک ربات به 4 درجه آزادی برای چیدمان درست شکلاتها نیاز دارد: حرکت در امتداد 3 بعد و چرخش حول محور عمودی. کلاول به منظور دستیابی به سرعت بالای کار، دو محدودیت اضافی به طراحی اضافه کرد: محرکهای ربات به قاب بسته میشوند. و قطعات متحرک ربات تا حد امکان سبک نگهداشته میشوند.
مطلب مرتبط: اتوماسیون صنعتی ABB – شرکت ABB
نمونه اولیه:
نمونه اولیه ربات دلتا شش ماه پس از سفر بهکارخانه شکلات به پایان رسید و در ماه دسامبر یک درخواست ثبت اختراع انجام شد. دو سال بعد، یک تجارت کوچک به نام Demaurex Robotics and Microtechnology ربات دلتا را صنعتی کرد. اگرچه طراحی مبتکرانه آن مهندسان و رهبران کسب و کار را خوشحال کرد، اولین واکنشها به ربات جدید خوب نبود. کلاول به یاد میآورد که آنها قدم اولیه را بر نمیداشتند. و اعتبار خود را با روباتی که شبیه یک چتر بود به خطر نمیانداختند. مصرف کنندگان بالقوه به دنبال این بودند که بدانند چگونه راه حل عملیات آنها را ساده میکند. همانطور که در مورد هر فناوری جدید وجود دارد.
متخصصان صنعتی پس از 32 سال دیگر نسبت به این رباتهای چتریشکل شک ندارند زیرا آنها از همه مدلهای قبلی در انتخاب و مکانیابی، مرتبسازی و دیگر کاربردهای با سرعت بالا و جرم کم پیشی گرفتهاند. با اینحال، آنها همچنان به پرس و جو در مورد اینکه چگونه رباتهای دلتا ممکن است روند تولید خود را بهبود بخشند و همچنین ارقام دقیق ROI را بررسی میکنند.

تنظیمات ربات دلتا:
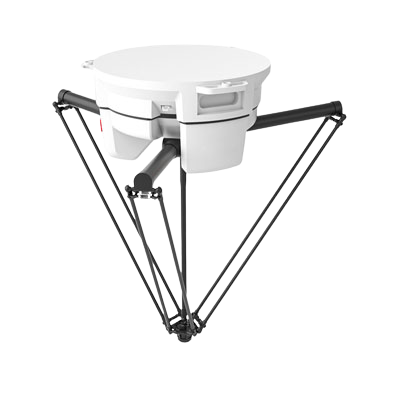
یک ربات دلتا معمولی بشرح زیر عمل میکند: این ربات روی یک قاب محکم سه سرووموتور با گشتاور بالا قرار داده شده است. یک بازو عمود بر محور چرخش هر شفت موتور ثابت است. برخی از رباتها از جعبه دنده استفاده میکنند. در حالی که برخی دیگر از محرک مستقیم استفاده میکنند، جایی که بازو مستقیماً روی شفت ثابت میشود. برای جلوگیری از چرخش، این بازوهای “Bicep” بهمیلههای پیوند نازکی که بصورت متوازی الاضلاع سازماندهی شدهاند وصل میشوند. یک سکوی مرکزی به این بازوها متصل شدهاست.
هر میله موازی دارای مفاصل در دو انتها است که معمولاً مفاصل توپی هستند و امکان حرکت آزاد را فراهم میکنند. افکتور انتهایی و گزینههای مختلف دیگر، مانند موتورهایی برای محورهای آزادی اضافی، ممکن است به پلتفرم پایینی اضافه شوند. اکثر رباتهای دلتا حداقل دارای یک محور چهارم هستند که امکان چرخش اجسام را فراهم میکند.
مزیت اساسی:
مزیت اساسی رباتهای دلتا این است که موتورهای حجیم به قاب متصل میشوند و اجزای متحرک ربات را بسیار سبک میکنند. اما یک ربات با بازوی مفصلی از یک موتور برای تحمل وزن تمام موتورهای قبلی استفاده میکند. دین الکینز، مدیر کل یاسکاوا موتومان، گفت:
«در طراحی مکاترونیک رباتهای دلتا، حرکت در بیشتر موارد به بازوهای فیبر کربنی منتقل میشود که در آن جرم بسیار کمتری در دست است.»
آنها اکنون ابزار بسیار بسیار مؤثری برای حرکت در راستای x، y، به علاوه مقدار کمی از z هستند.
این طراحی مبتنی بر اهرم نیاز به گشتاور خروجی قوی از موتورها برای جبران افزایش اهرم بار در شفت دارد. در نتیجه اکثر دلتاها دارای بار کم هستند. الکینز افزود: “گشتاور زیادی روی موتورها وجود دارد که تا مچ دست ربات منتقل میشود. شما میتوانید یک عصا را به طول 1300 میلی متر یا بیشتر به دلیل آفست و فاصله از خود موتور حرکت دهید. مفهوم این است که حتی اگر موتورها گشتاور زیادی داشته باشند، باز هم باید با این افست کنار بیایید.برای حفظ سرعت، بار را محدود میکنید.
پیکربندیهای مختلفی در دسترس است، اگرچه سه بازو و چهار محور آزادی رایجترین موارد برای روباتهای دلتا هستند. بعنوان مثال، Omron ربات موازی Quattro را ارائه میدهد. این شرکت ادعا میکند که این طراحی ربات را قادر میسازد تا بار سنگینتری را حمل کند یا وظایف خود را در زمان کوتاهتری انجام دهد.
مطلب مرتبط: اتوماسیون صنعتی امرون – شرکت امرون
پیکربندی ربات دلتا:
وقتی از عاطف مسعود، مدیر مهندسی اتوماسیون سروو، رباتیک و اتوماسیون در Omron Automation Americas در مورد گزینههای پیکربندی سؤال شد، پاسخ داد:
“ما یک طراحی منحصر به فرد داریم که از 4 موتور با 4 اتصال استفاده میکند. این ربات دارای چهار پیوند موازی به جای سه پیوند است. این امر باعث میشود تا 6 کیلوگرم با چرخش در پایین و تا 15 کیلوگرم بدون آن. با این حال، در مقایسه با این طراحی خلاقانه، رباتهای معمولی ما، برای مثال، میتوانند 150 قطعه در هر دقیقه تولید کنند.”
مطلب مرتبط: سرووموتور چیست؟ کاربرد آن
این موضوع باعث ایجاد یک مسئله جالب در مورد حرکت تتا حول محور z، چهارمین محور آزادی ربات دلتا میشود. در درجه اول دو استراتژی طراحی برای این وجود دارد. بهگفته مسعود، رویکرد مرسوم “این است که سه موتور در بالا و سپس یک موتور جداگانه برای انجام چرخش نصب شود”. امرون دارای این خصوصیت است. موتور را میتوان روی پلت فرم یا در بالا نصب کرد. با این حال، اگر موتور در بالا نصب شده باشد، شفت محرک مورد نیاز است. اگر موتور در آنجا نصب شود، اینرسی افزایش مییابد، زیرا موتور کوچکتر و سنگینتر خواهد بود.”
روی فریزر، مدیر محصول جهانی رباتهای بستهبندی ABB، ادعا میکند که ساختار شفتدار تعدادی مزیت از جمله محموله بزرگتر را ارائه میدهد. شفتهای تتا و شفتهای کاملاً چرخشی که قادر به چرخش مداوم 360 درجه هستند، مشمول تعدادی از طرحهای ثبت شده ما هستند. ما به جای اتصال موتور به صفحه میانی از شفت برای هدایت حرکت تتا استفاده میکنیم زیرا انجام این کار باعث اضافه وزن، کاهش بار و کاهش قابلیت اطمینان میشود. با طراحی شفت از این مشکلات جلوگیری میشود. فریزر به یک مشکل قابلیت اطمینان در کابل اشاره کرد که باید به موتور هدایت شود.
سیم باید بتواند در برابر فشارهای مکرر خمش و پیچش بدون تداخل با بازوهای پرسرعت مقاومت کند. از سوی دیگر، تکنیک شفت، یک جزء دیگر را اضافه میکند که نیاز به نگهداری دارد. شفت ممکن است در نهایت نیاز به تعویض داشته باشد یا در برخی شرایط فقط بطور منظم با روان کننده نگهداری شود.

حتما بخوانید:
محورهایی که یک ربات دلتا میتواند در آنها دستکاری کند چیست؟
در مقایسه با رباتهای دستکاری سریالی، رباتهای دلتا دامنه حرکتی سادهتری دارند. رباتهای دلتا در فضای کاری خود دارای حرکات x و y نامحدود هستند. حرکت محور Z برد کمتری دارد. با این حال، چرخش در مورد محورهای x، y و z ممکن است گاهی اوقات بستهبهکاربرد ضروری باشد. الکینز از Yaskawa Motoman گفت:
“مثلاً دیدن محورهای چرخان یا چرخاندن محورها به قسمتهای عمودی غیرعادی نیست. میتوانید آن قطعات را با افزودن محورهای خارجی بچینید و در بسیاری از موقعیتها میتوانید محور رول دیگری را اضافه کنید، اگر میخواهید یک برنامه قالبگیری ضربهای را در نظر بگیرید که ممکن است بخواهید بطریهای افقی را از هم جدا کنید و آنها را به شکل یک نوع سرباز یا یکپارچه قرار دهید.”
فیل زانوتی، مهندس جابجایی مواد در FANUC آمریکا، موافق بود که:
“یک چهار محور برای اکثر وظایف ربات دلتا ضروری است. بدون شک کاربردهایی وجود دارند که به شش محور نیاز دارند، زیرا به عنوان مثال، شش محور به شما امکان میدهد کمی بطری را به سمت بالا بچرخانید یا یک عمل مشابه را میتوانید انجام دهید. چیزی را که روی زمین بوده بردارید و آن را ایستاده قرار دهید. در اینجاست که میتوانید آن ربات خاص را تشخیص دهید.”
به گفته سمیر پاتل، رئیس بخش محصولات و مهندسی پیشرفته رباتیک کاوازاکی بار، دیگر عاملی است که ممکن است به شما در تعیین گزینه بهینه ربات کمک کند. مدل دلتا ممکن است از نظر تئوری برای پشتیبانی از بار بیشتری ساخته شود، اما ساختار سنگین تر باعث کاهش چرخه در دقیقه میشود. شاید فیزیک پیچیده یک ربات دلتا در آن لحظه ارزشی نداشته باشد. یک ربات SCARA ممکن است در حمل بار سنگینتری از منظر قابلیت اطمینان یا هزینه کارآمدتر باشد. بعنوان مثال، طبق گفته پاتل، برخی از روباتهای SCARA میتوانند 20 کیلوگرم حرکت کنند.
حتما بخوانید:
انواع ربات های جوشکاری و کاربرد آنها
به چه تعداد ربات نیاز دارید؟
پاسخ دادن به این سوال برای مشتریان اتوماسیون جدید میتواند چالش برانگیز باشد. به موارد زیر فکر کنید:
- پاکت کار و فاکتور شکل
- نیازهای سیستم بینایی
- برنامه ریزی و کنترل
اگرچه رباتهای دلتا در انجام کارهای انتخاب و جابجایی با سرعت بالا بسیار عالی هستند، اما متأسفانه هنوز توسط قوانین فیزیکی، بهویژه قانون اول نیوتن، محدود میشوند. برخی از رباتهای دلتا میتوانند شتابهایی بین 12 تا 15 گرم ایجاد کنند. ممکن است کالای در دست شما آزاد شود و به پرواز درآید اگر با کاهش سرعت، قدرت گرفتن کافی نداشته باشید. زیرا رباتهای دلتا خیلی سریع شروع به کار میکنند و متوقف میشوند. برای برخی از کاربردها، خلاء با قدرت بسیار بالا مورد نیاز است. برخی از اقلام قادر بهگرفتن با مکش نیستند و استفاده از گیرههای مکانیکی الزامی است. طبق گفته پاتل از رباتیک کاوازاکی، بطور طبیعی ظرفیت توسط گیرههای مکانیکی کاهش مییابد. زیرا آنها به افکتکننده انتهایی وزن اضافه میکنند.
گیرههای مکنده به دلیل فعالسازی سریع و تکرارپذیری زیاد، محبوبترین افکتکنندههای پایانی برای رباتهای انتخاب و مکان هستند، اگرچه مکش نمیتواند برای کار با تمام اجسام استفاده شود. بعنوان مثال، یک گیره مکانیکی معمولاً برای دستکاری اجسام با سطوح متخلخل یا ناهموار استفاده میشود. در حالیکه برداشتن و رها کردن هر جسم نیاز به باز و بسته شدن انگشتان دارد، گیرههای مکانیکی زمان چرخه کوتاه تری دارند.
![]()
چرا از رباتهای دلتا استفاده کنیم؟
آنها بدون شک بعنوان جایگزینی برای انتخاب و قرار دادن برنامههای کاربردی با سرعت بالا محبوبیت پیدا میکنند. برای طولانیترین زمان، گزینههای ما به فناوری بازوی مفصلی کندتر یا فناوری SCARA کمی سریعتر محدود میشد. با این حال، با ظهور رباتهای دلتا، اکنون میتوانیم اجزای سنگین را به هوا و روی سازهها برسانیم و سرعت انجام این کار را به شدت افزایش دهیم، زیرا اغلب جرم کمتری را جابهجا میکنیم. او گفت:
“آنها برای زمانی که شما مجبور هستید سریع باشید فوق العاده هستند.”
فریزر از ABB آنچه را که گفتهبود تکرار کرد:
“در واقع، این در مورد بررسی ساخت ربات است. سرعت خطوط تولید در نتیجه روندهای بزرگ جهانی در حال افزایش است. در مقایسه با روباتهای مفصلی معمولی و حتی رباتهای دکارتی، ربات دلتا مزیت مکانیکی بسیار بالایی در عملکرد و انعطاف پذیری ارائه میدهد.”
از زمانی که دکتر کلاول اولین رباتهای دلتا را ایجاد کرد، انتخاب و مکان تنها هدف این ماشینها بوده است. زانوتی از FANUC موافق بود. او این نکته را با گفتن این جمله خلاصه کرد:
“معمولاً، اگر شما سرعت ثابتی داشتید – بسیاری از قطعات در تسمه نقاله در حال حرکت هستند، صدها قطعه در دقیقه – به یک ربات دلتا نیاز دارید. رباتهای دیگر میتوانند با سرعت بالا کار کنند، اما آنها میتوانند نمیتوانند نرخ ثابت را بدون گرم شدن بیش از حد یا استفاده از موتورهای بیش از ظرفیت خود حفظ کنند.”
ایمنی:
معیارهای ایمنی رباتهای دلتا مانند سایر رباتهای صنعتی است. پاتل از کاوازاکی در مورد حفاظت لازم برای برنامههای کاربردی مربوط به انتخاب و مکان ربات دلتا اطلاعات دارد. ربات دلتا بدون شک نیاز به محافظت دارد. میتوان از پلکسی گلاس یا ساختار مش سیمی استفاده کرد.
یکی از مواردی که باید مورد توجه قرار گیرد این است که این امکان وجود دارد که یک مکش یا گیره مکانیکی هنگام حرکت محصول دچار نقص شود و محموله را به پرواز درآورد. بنابراین، بسیار مهم است که مطمئن شوید که از این خطر محافظت میشود.
حتما بخوانید:
اینترنت اشیا (IOT) چیست؟ کاربرد آن در صنعت
توجه: گروه صنعتی سپیانی در زمینه ساخت ربات دلتا فعالیتی ندارد.